
 Болезни
Болезни  Педиатрия
Педиатрия Первая помощь
Первая помощь Анатомия
Анатомия Питание
Питание Препараты
ПрепаратыВ основе биомеханики работы мышц лежит сократительная способность мышечной ткани. Движение конечностей осуществляется посредством приближения подвижной точки к неподвижной, а мышечная сила зависит от угла расположения волокон к сухожилию, площади сечения, величины опоры и других факторов.
Работа, выполняемая мышцами, основана на стандартных принципах механики: чем дальше от оси прикладывается сила, тем больше КПД.
Тело человека, подобно любому физическому телу, находящемуся на поверхности земли, подвержено действию силы тяготения, величина которой равна массе тела. Эта сила притягивает тело к земле и стремится опрокинуть его из неустойчивого вертикального положения на двух ногах.
О том, как работают мышцы тела человека, подробно рассказывается в данной статье.
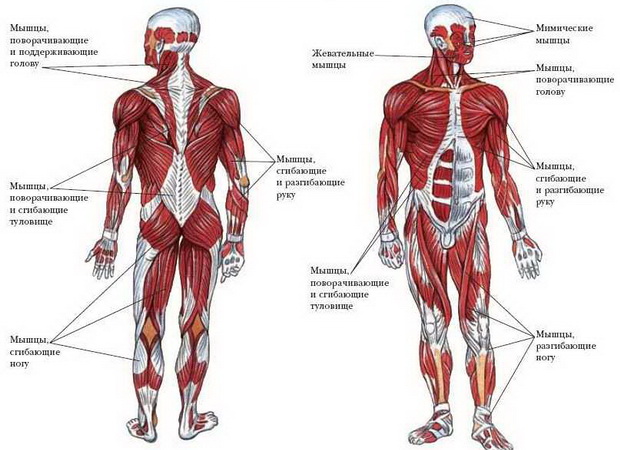
Какую работу выполняют мышцы конечностей: биология и физиология
Как известно, устойчивость тела определяется положением его общего центра тяжести (ОЦТ), которым служит точка приложения силы тяжести в организме, относительно поверхности опоры тела.
Масса тела образуется из масс составляющих его частей: туловища, головы и конечностей. Поэтому говорят, что ОЦТ — это точка приложения равнодействующей сил тяжести всех частей тела. И характеристика работы мышц зависит именно от положения общего центра тяжести.
В положении стоя ОЦТ тела человека расположен примерно в центре малого таза. Каждая часть тела имеет свой центр тяжести.
Если ОЦТ находится ниже опорной поверхности (т. е. тело подвешено к верхней опоре), то тело занимает устойчивое положение. Такое положение свойственно маятнику и подобным ему телам.
Будучи выведенным из состояния равновесия, тело при верхней опоре, как и маятник, неизбежно возвращается в исходное равновесное состояние. При верхней опоре обычно запускается механизм работы мышц верхней конечности, а также мышцы той нижней конечности, которая свободно перемещается при ходьбе.
В случае нижней опоры ОЦТ располагается выше опорной поверхности, и тело занимает неустойчивое положение. В таком неустойчивом положении находится тело человека при вертикальном положении.
Поэтому требуется огромная работа мышц всего тела человека, и особенно нижних конечностей (сгибателей и разгибателей главных суставов), по удержанию тела в вертикальном положении.
Площадь опоры всего тела образуется площадью, занятой поверхностями стоп, на которые тело опирается, и площадью пространства между ними. Чем шире расставлены ноги, тем больше его площадь опоры и тем устойчивее тело.
Работают мышцы так, как обусловлено физическим законом: тело до тех пор сохраняет устойчивое вертикальное положение, пока ОЦТ тела проецируется в пределах площади опоры (т. е. вертикаль, опущенная из ОЦТ тела, находится в пределах площади опоры).
Если проекция ОЦТ тела выходит за пределы площади опоры, то тело опрокидывается. В тех случаях, когда проекция ОЦТ приближается к краю площади опоры, механическая работа мышц, их напряжение резко возрастает, т. к. приходится выполнять сложную миссию по преодолению силы тяжести.
В биомеханическом отношении любое перемещение тела в пространстве, а также сохранение его позы есть результат сложной координации сокращения отдельных мышц и согласования развиваемых мышечных усилий с силами тяготения, действующими на тело и его части.
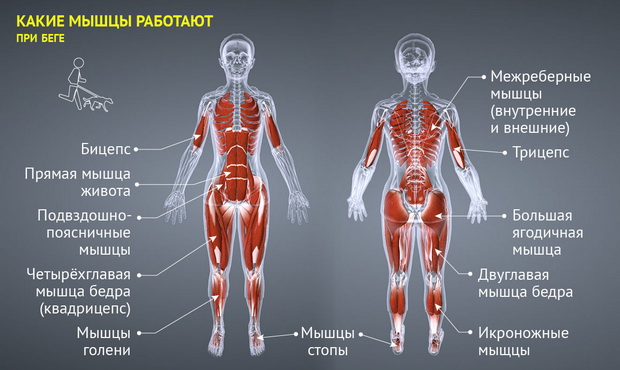
В основе биомеханики мышц человека и самого процесса локомоции (ходьбы, бега и т. п.) у человека лежит скоординированная работа почти всех мышц, в результате которой осуществляется перемещение ОЦТ тела относительно площади опоры, а также активное изменение площади опоры при перестановке ног.
У человека нижние конечности являются органами движения. В отличие от них верхние конечности — органы обслуживания тела, которые у человека в процессе эволюции преобразовались в органы труда.
Для работы мышц нижней конечности человека и степени их напряжения как в положении стоя, так и при ходьбе (основном виде локомоции у человека) определяющим фактором является отношение вертикали, проходящей через ОЦТ, к поперечным осям главных суставов (тазобедренного, коленного и голеностопного).
Благодаря небольшим перемещениям туловища вперед или назад достигается соответствующее смещение ОЦТ, в результате чего сила тяжести тела используется для облегчения работы мышц. Подобная координация движений и сокращений осуществляется нервной системой.
Важно отметить, что физиология координации работы мышц при выполнении любых движений вырабатывается у ребенка постепенно в процессе обучения и по мере развития опорно-двигательного аппарата.
Основной модус развития заключается в том, что путем проб и ошибок вырабатывается наиболее рациональный для каждого индивидуума способ выполнения движений при минимальной затрате мышечных усилий.
Кости, подобно механическим рычагам, передают усилия мышечных сокращений соответствующим частям тела. Каждый сустав является точкой опоры для соединенных в нем костей. При сокращении мышца укорачивается, в результате чего две точки на костях, к которым она прикрепляется, сближаются.
При этом мышца совершает механическую работу, определяемую как произведение силы мышцы на расстояние перемещения точек ее прикрепления.
Механизм работы мышц: от чего зависит мышечная сила
Сила мышцы, развиваемая при ее сокращении, противодействует силе тяжести, действующей на тело в целом и на отдельные его части. Поскольку мышцы прикрепляются к костям под углом, то лишь часть мышечной силы идет на преодоление силы тяжести.
Биология работы мышц, их сила непосредственно зависит от следующих факторов:
- Площадь ее поперечного сечения и число участвующих в сокращении мышечных волокон
- Протяженность места начала и места прикрепления мышцы (площадь ее опоры)
- Архитектоника пучков мышечных волокон, т. е. угол, под которым они располагаются к сухожилию мышцы, что хорошо выражено в мышцах, имеющих перистое строение
- Другие факторы (содержание миоглобина, особенности васкуляризации мышечных волокон и т. п.)
Места прикрепления мышц к костям и отношение их к осям суставов, на которые они действуют, играют ключевую роль в биомеханике мыщц в частности и всего опорнодвигательного аппарата в целом, т. к. от этих анатомических факторов непосредственно зависит величина плеча силы мышечной тяги.
Согласно законам механики, чем больше плечо мышечной тяги, тем меньшее усилие необходимо затратить на выполнение движения. Кости, подобно механическим рычагам, передают усилия мышечных сокращений соответствующим частям тела.
Какую работу выполняют мышцы, зависит от рычага.
Если сила тяжести и сила мышечной тяги прикладываются с двух сторон отточки опоры рычага, то мы имеем дело с рычагом равновесия (рычаг I рода). Подобная конструкция широко используется в теле человека.
Примерами служат соединение головы с позвоночным столбом и согласованная работа передней и задней групп мышц шеи по удерживанию головы в горизонтальном положении; соединение туловища с нижними конечностями в тазобедренных суставах и согласованная работа сгибателей и разгибателей бедра в сочетании с другими мышцами по удерживанию туловища в вертикальном положении.
Если сила тяжести и сила мышечной тяги располагаются по одну сторону от точки опоры рычага, то мы имеем дело с рычагом II рода. Это наиболее распространенный способ соединения и динамической работы мышц отдельных сегментов конечностей.
Точкой опоры рычага является место соединения костей в суставе. Особенности работы рычагов II рода определяются местом прикрепления мышц по отношению к осям суставов, на которые они действуют, т. е. величиной плеча мышечной тяги.
Если плечо мышечной тяги меньше плеча силы тяжести, как это имеет место в случае сокращения двуглавой мышцы плеча и сгибания в локтевом суставе, то для движения предплечья и кисти требуется большое усилие, но при этом достигается большой размах движения и относительно высокая угловая скорость перемещения предплечья.
Такую разновидность рычага II рода называют рычагом скорости.
В том случае, если плечо силы мышечной тяги больше, чем плечо силы тяжести, то мы имеем другую разновидность рычага II рода — рычаг силы. Одним из примеров использования такого рычага силы является работа стоп, на которые действует вся масса тела.
При подъеме на носки происходит разгибание в плюснефаланговых суставах, сила тяжести тела передается на стопу через голеностопный сустав, плечо силы тяжести будет равняться расстоянию между осями обоих суставов.
Трехглавая мышца голени, производящая это движение, прикрепляется к пяточному бугру пяточной кости, и плечо силы мышечной тяги будет равно расстоянию между пяточным бугром и осью плюснефаланговых суставов. Размах движений небольшой, но при этом эффективно используется сила трехглавых мышц голени, которая противостоит силе тяжести всего тела.
Механическая работа мышц синергистов и антагонистов
Поскольку выполнение любого движения является результатом содружественного (сочетанного) действия целого ряда мышц, принято выделять мышцы синергисты и антагонисты.
Особенность работы мышц-синергистов заключается в том, что они совместно выполняют одно и то же движение в суставе (например, все мышцы, которые участвуют в сгибании кисти).
А как работают мышцы-антагонисты?
Эти мышцы участвуют в противоположных движениях (например, сгибают и разгибают кисть).
Как правило, мышцы-синергисты расположены на одной поверхности тела или конечности, а мышцы-антагонисты — на противоположных (например, мышцы-сгибатели — на передней поверхности плеча и предплечья, а мышцы-разгибатели — на задней).
Понятие синергизма и антагонизма мышц относится к их функциональной характеристике. Так, мышцы, работающие в одном движении как синергисты, в другом движении могут быть антагонистами. Согласование работы, совершаемой группами мышц, достигается за счет координации их сокращений со стороны нервной системы.
